便利なブロックダイヤグラム集
単なる備忘録です。いちいち導出するのが面倒なのでまとめました。一般の電子式アナログコンピュータで適用可能なメソッドです。詳細情報については参考文献をご覧ください。
完全に個人用のメモはこっち(見ても面白くない)→自作機EDEQS23専用運用メモ
目次
- ブロックダイヤグラム集
- 参考文献
1.ブロックダイヤグラム集
以後、計算機のマシンユニット(演算単位)は10Vであるものとする。
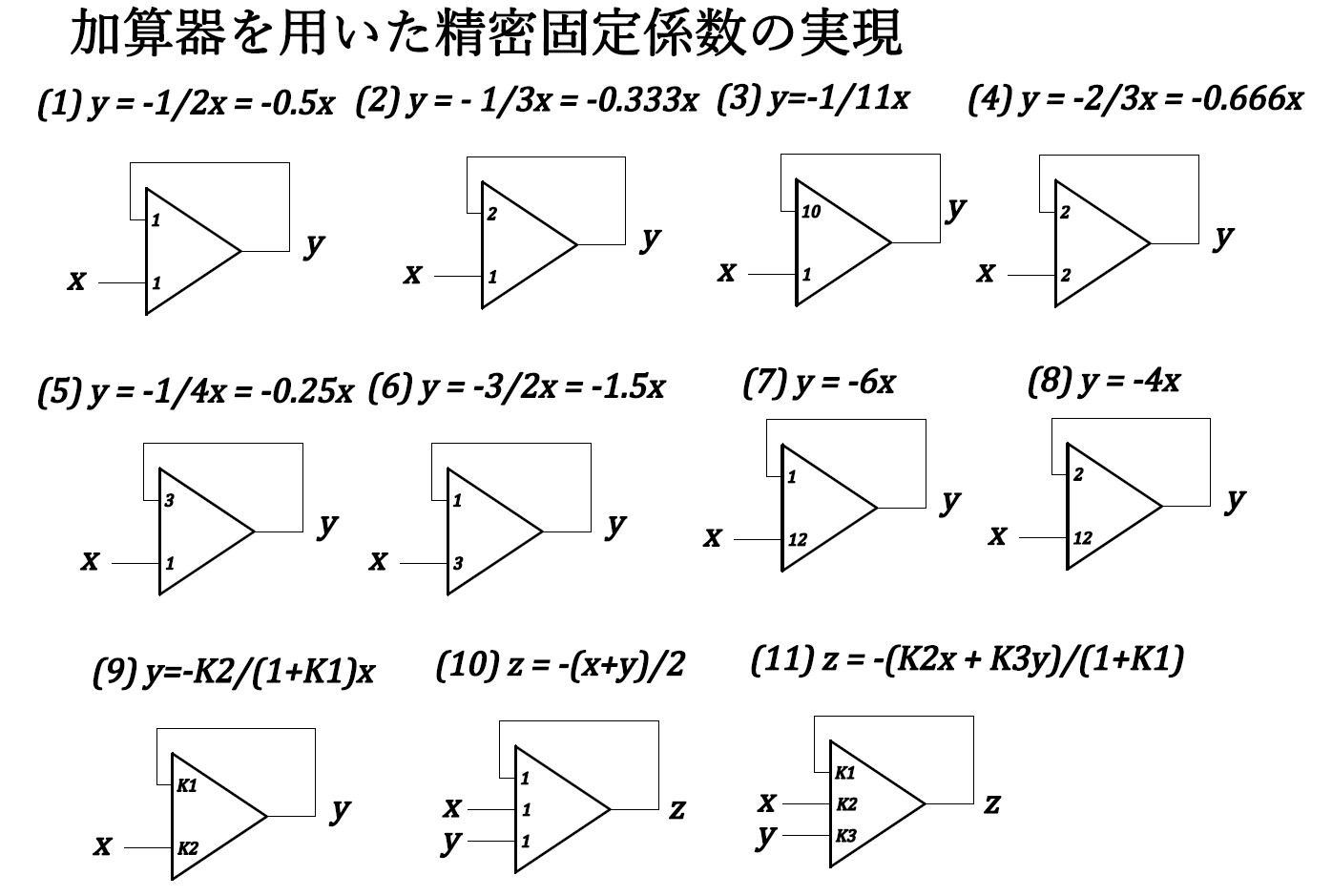
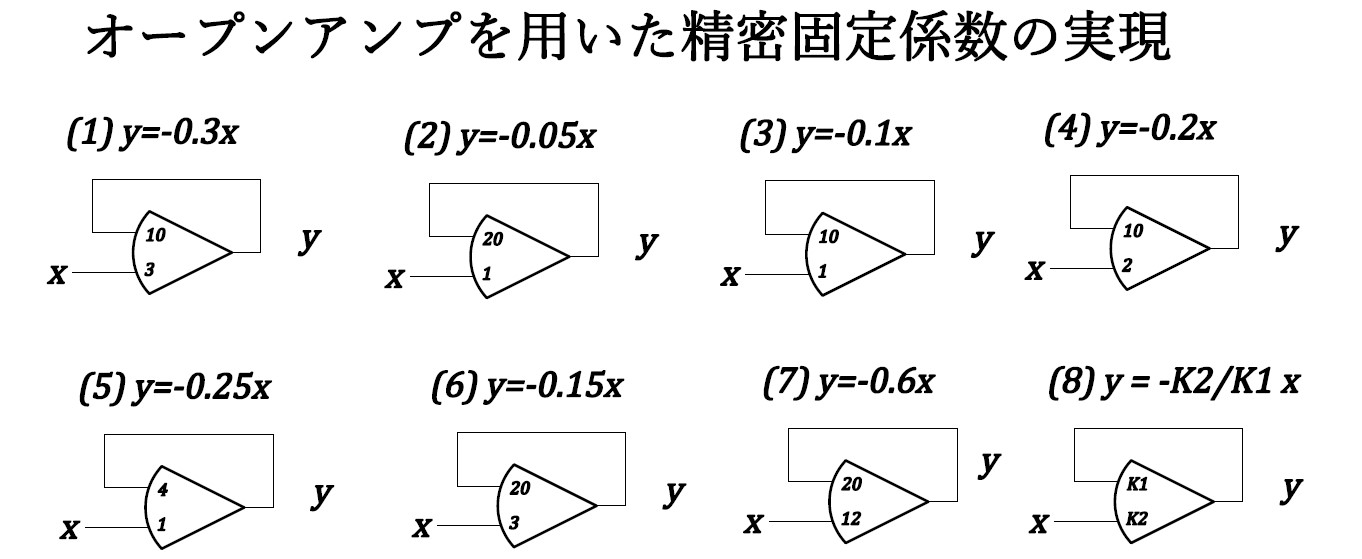
1.1 固定係数
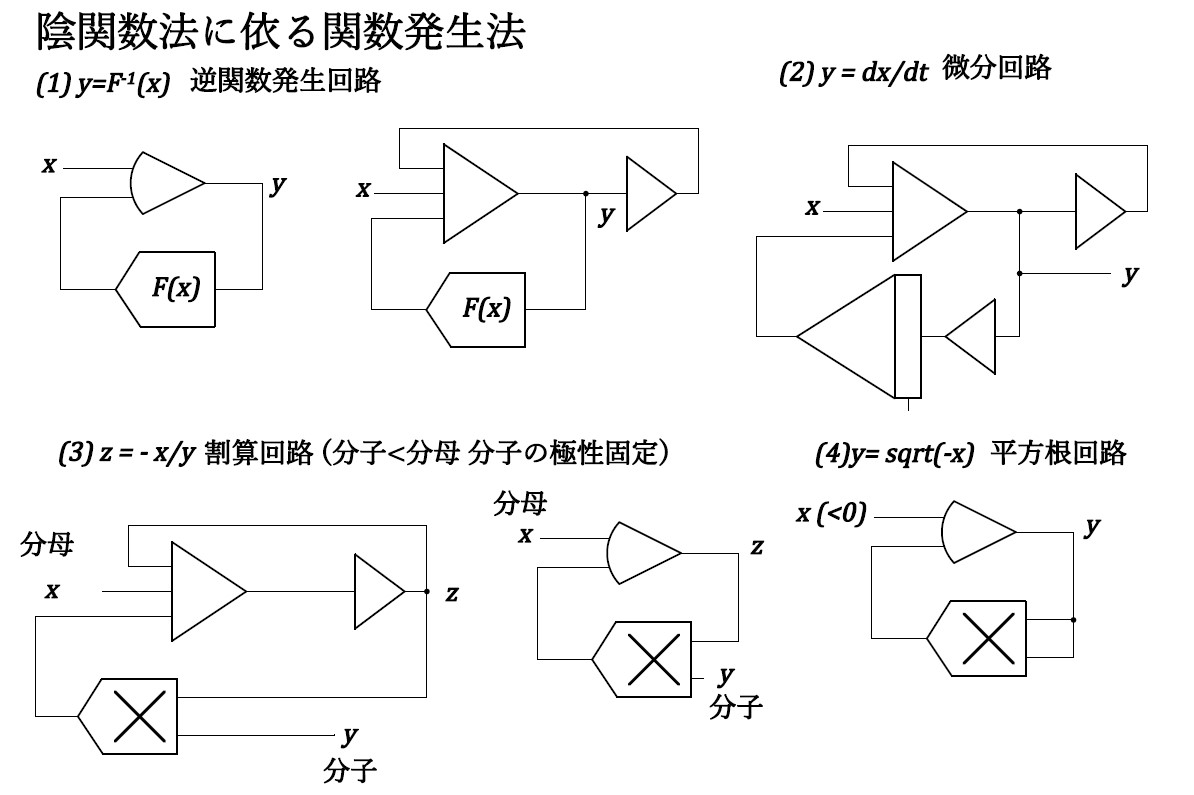
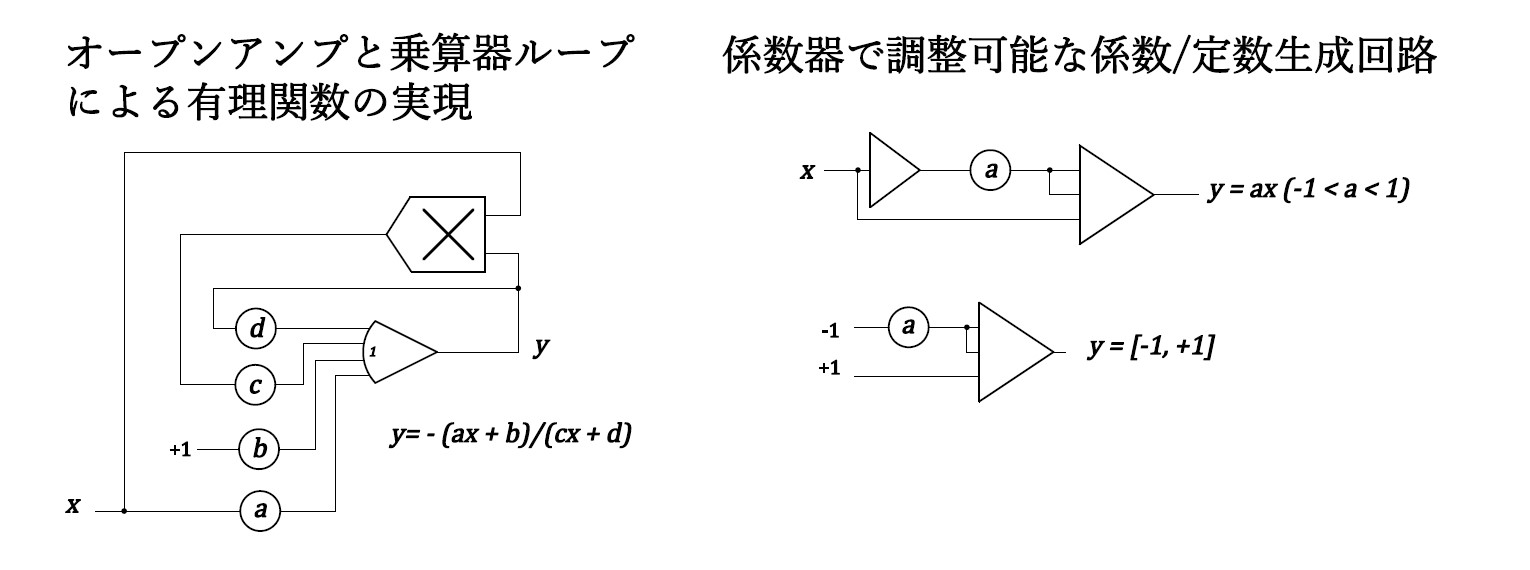
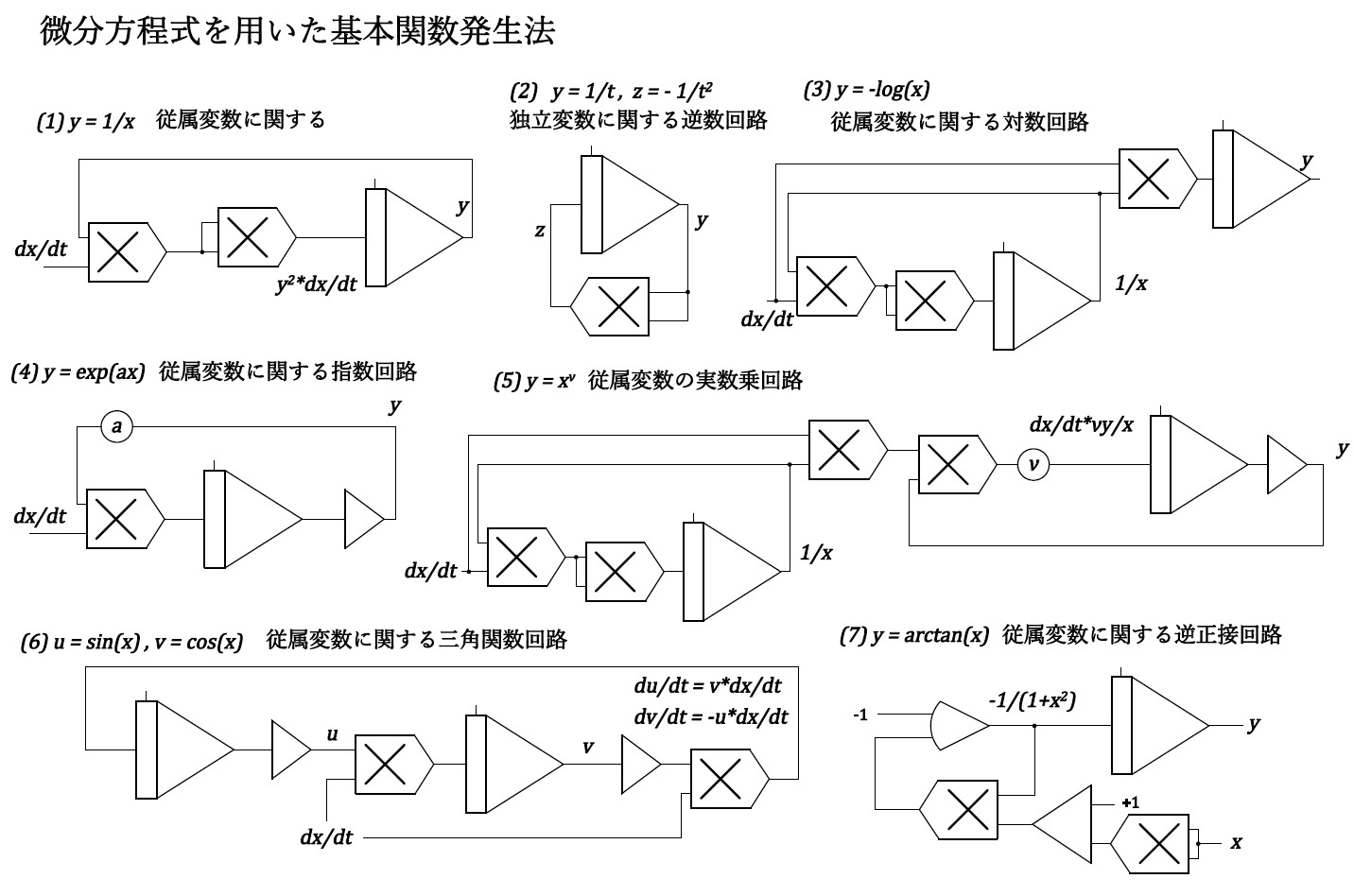
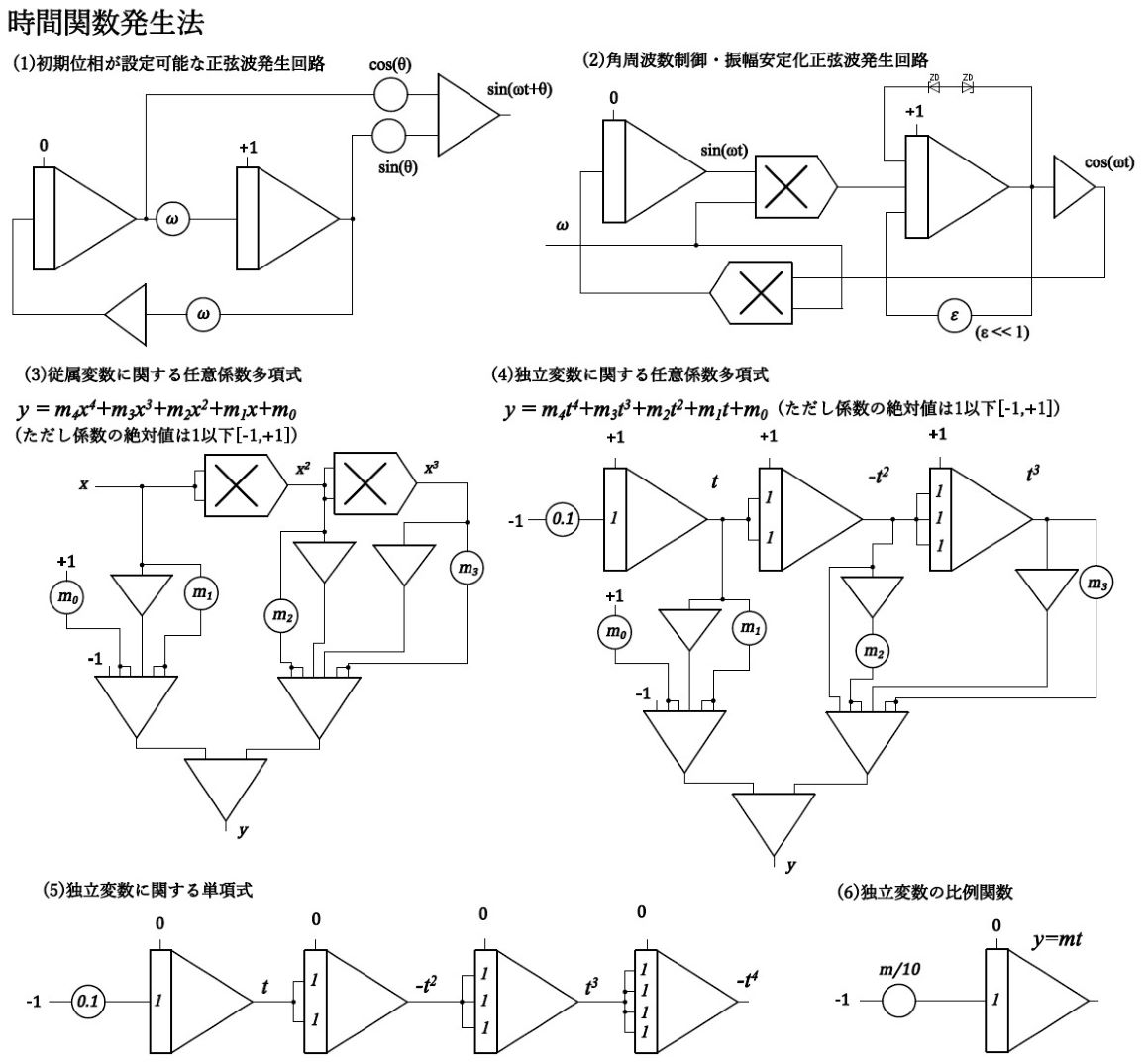
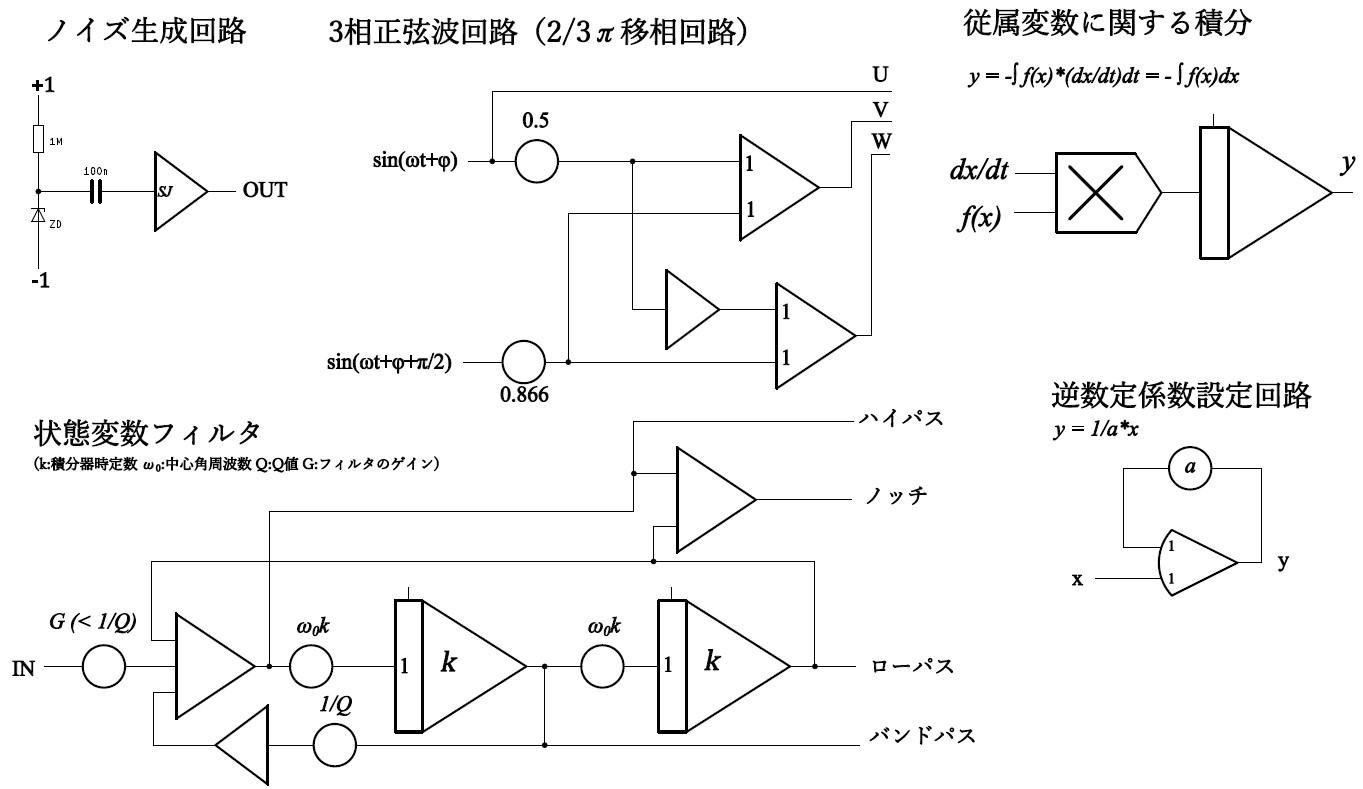
1.2 基本関数の発生
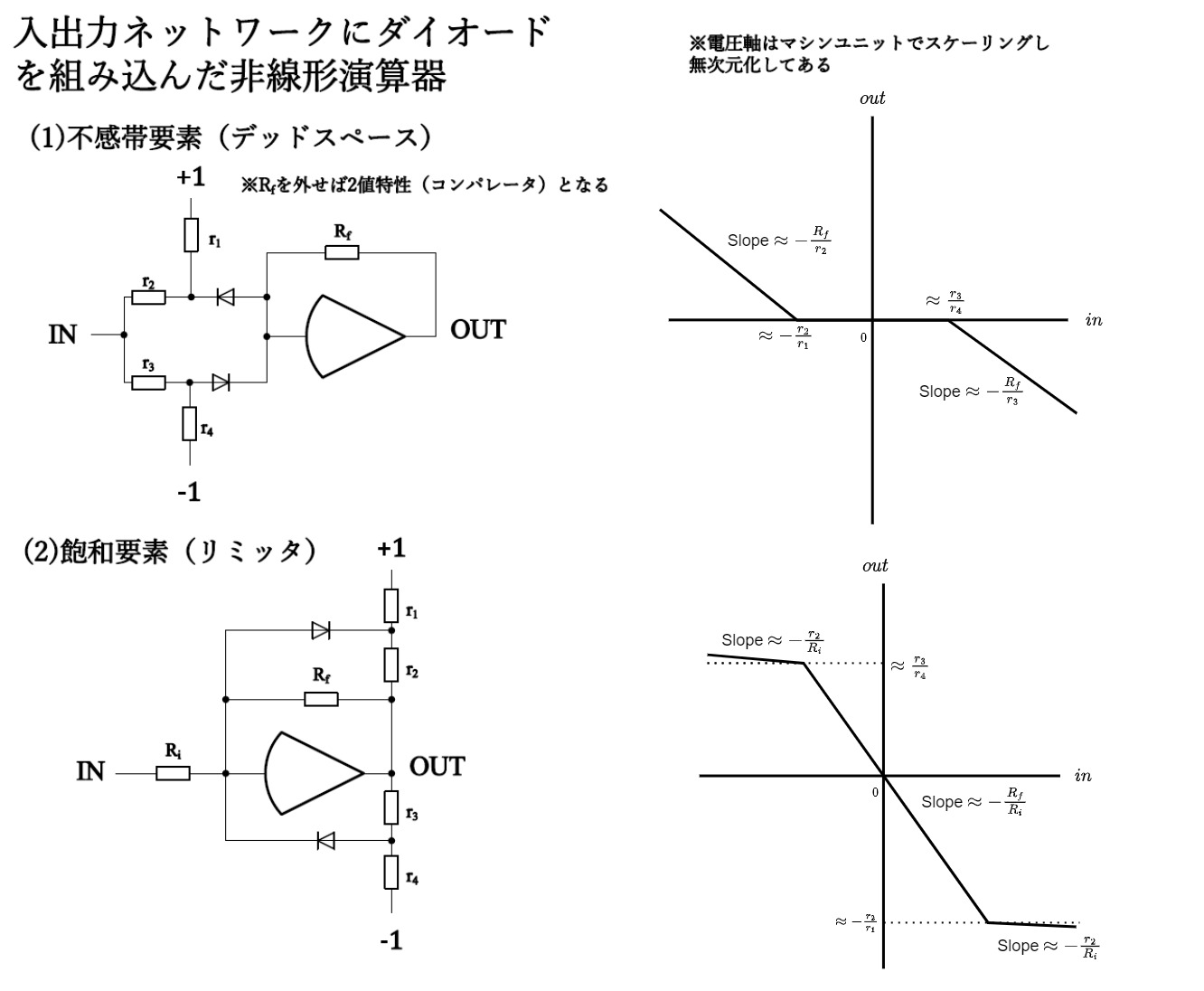
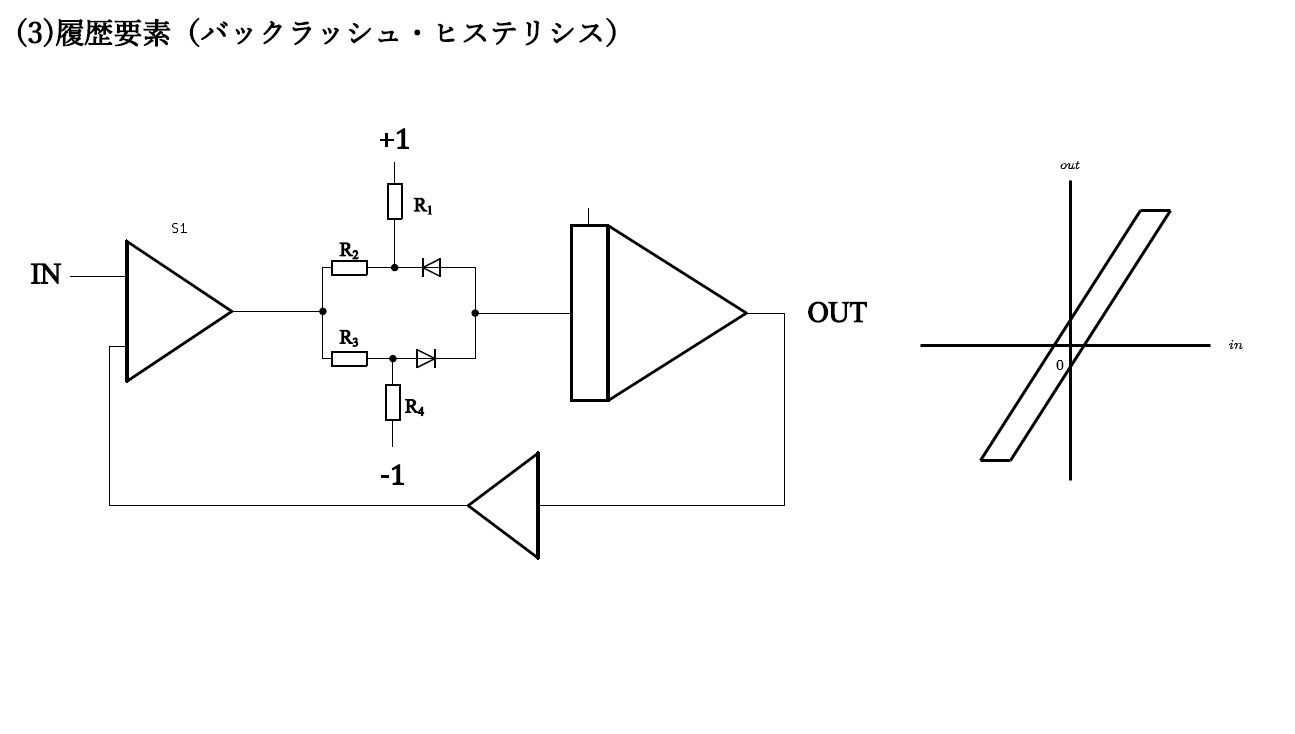
1.3 ダイオードを利用した非線形演算器
1.4 比較器を利用した非線形演算回路
1.5 座標変換・投影
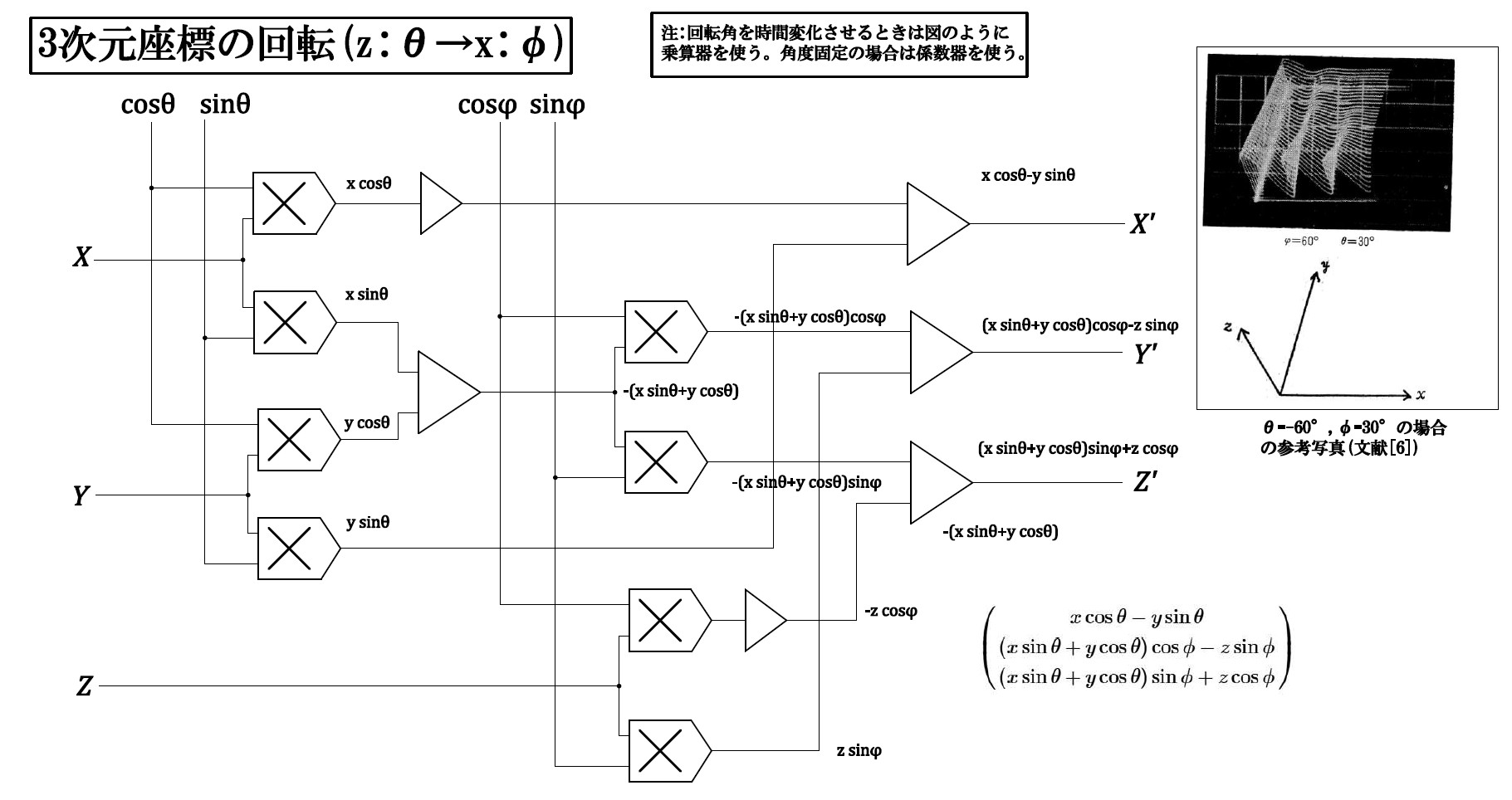
(1) z軸を中心に\(\theta\) 回転→x軸を中心に\(\phi\) 回転 (いずれも時計回りを正とする)
\begin{eqnarray} \left(\begin{array}{ccc} x'\\y'\\z'\end{array}\right)&=&\begin{pmatrix}1&0&0\\0&\cos{\phi}&-\sin{\phi}\\0&\sin{\phi}&\cos{\phi}\end{pmatrix}\begin{pmatrix}\cos{\theta}&-\sin{\theta}&0\\\sin{\theta}&\cos{\theta}&0\\0&0&1\end{pmatrix}\begin{pmatrix}x\\y\\z\end{pmatrix}\\\\&=&\begin{pmatrix}x\cos{\theta}-y\sin{\theta}\\(x\sin{\theta}+y\cos{\theta})\cos{\phi}-z\sin{\phi}\\(x\sin{\theta}+y\cos{\theta})\sin{\phi}+z\cos{\phi}\end{pmatrix}\end{eqnarray}
反時計回りに回転させたい場合は、回転行列内の\(\sin\)の要素だけ符号を逆にすればよい。
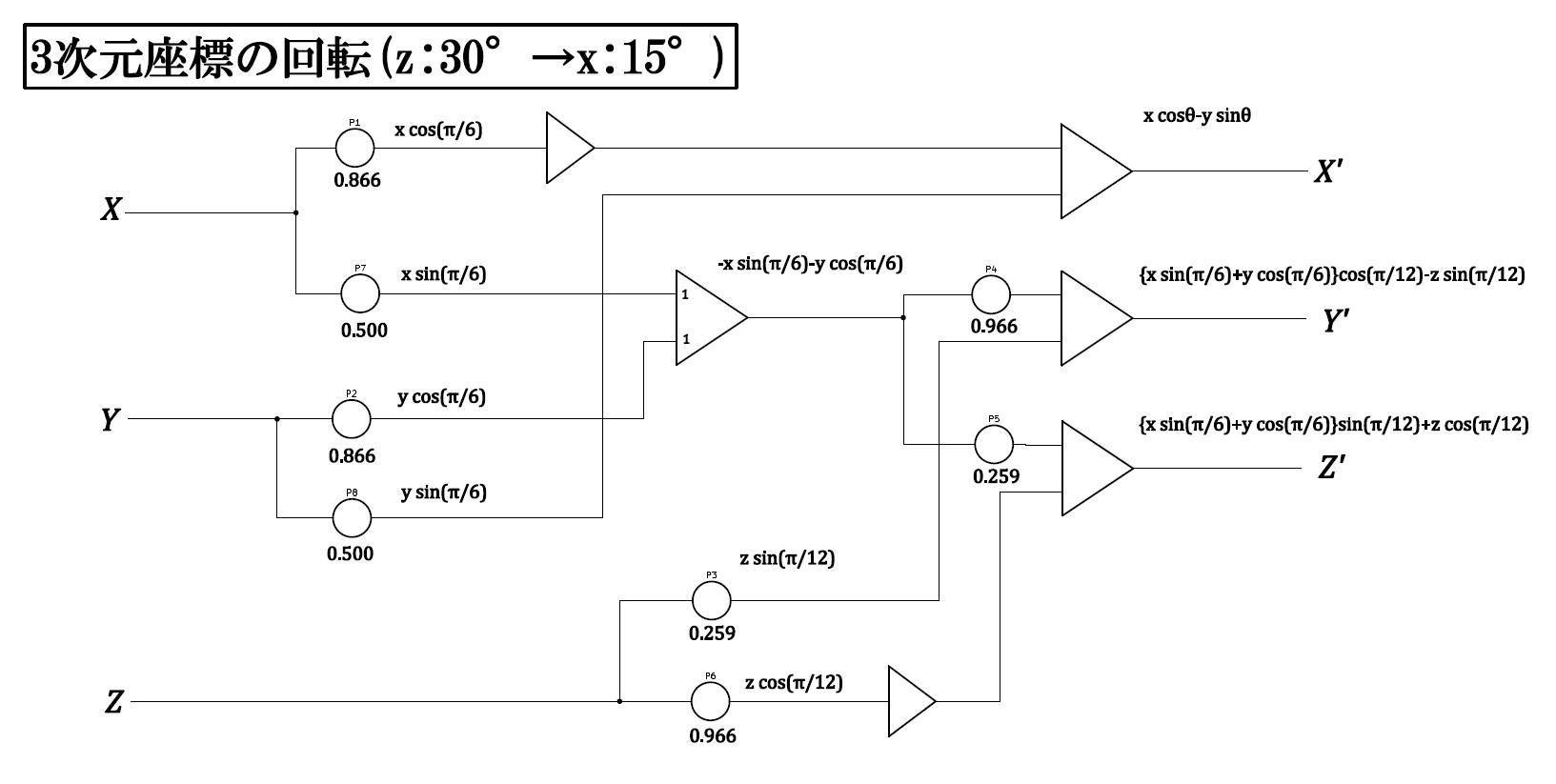
\(\theta=π/6\,,\phi=\phi/12\) で固定する場合は以下のような構成になる。パラメータを変化させて方程式の解を立体的に表示したい場合、この回路の\(x\)軸に独立変数、\(z\)軸に従属変数、\(y\)軸に可変パラメータを入力すると見通しの良い図が得られる。
1.6 その他便利な回路
2.参考文献
[1] 野村民也, 三浦武雄. 「アナログ電子計算機」 コロナ社, 1960.
[2] 藤田広一. 「アナログ計算機のプログラム」昭晃堂,1978.
[3] 山下英夫. 「電子計算機 アナログ計算機編」オーム社, 1959.
[4] Michael Koch. " THAT Analog Computer Book Collection of Examples, useful Hints and Electronic Circuits "
http://www.astro-electronic.de/THAT_Analog_Computer_Book.pdf
[5] Granino A. korn & Theresa M. Korn. "Electronic Analog And Hybrid Computers" McGraw-Hill Book Company, 1964.
[6] 井上浩, 横田重雄.「アナログ電子計算機の3次元表示について」富山大学工学部紀要. (通号 20) 1969, p.20~32.