複素関数と等位線・高次多項式の複素根
目次
1.複素関数の絶対値(の2乗)の等位線と最急降下曲線
複素数変数のn次多項式関数
\[\sum_{k=0}^{n}{a_{k}z^{k}}\qquad\,z\in\mathbb{C},\,n\in{\mathbb{N}},\,n\geq{1},\,a_{k}\in{\mathbb{R}}\tag{1}\]
の根を求めたいときや、複素関数としての性質を調べたいとき、その絶対値もしくはその2乗 を \(z\) 平面上にプロットすることは有意義なことである。その場合は、複素数から実数へ写す関数となるわけだから、アナログコンピュータ上では2実変数関数に準じた扱いが可能になる。
今回は、複素変数高次多項式の絶対値(の2乗)の等位線 (Level Line, Contour Line) 及びそれに直交する曲線(最急降下曲線)をアナログコンピュータで描出することを目標とする。
1.1 複素関数
複素平面上の開集合 \(\Omega\subset\mathbb{C}\) において、 複素関数 \( w:\Omega\longrightarrow\mathbb{C} \) を考える。複素数 \(z=x+iy\;(x,y\in\mathbb{R})\) に対して、
\[ w(x+iy)=u(x,y)+i\,v(x,y) \tag{2} \]
と表す。ここで、
\[ \Omega_{\mathbb{R}} \equiv \left\{(x,y)\in\mathbb{R}^2\mid x+iy\in\Omega\right\}, \qquad u,v:\Omega_{\mathbb{R}}\longrightarrow\mathbb{R} \tag{3}\]
である。以下、関数 \(w\) は領域 \(\Omega\) 上の正則関数とする。また、\(w\) の絶対値の2乗を新たに関数 \(f\,:\,\Omega_{\mathbb{R}}\to\mathbb{R}_{\geq{0}}\) として定める。
\[{f(x,y)}=|w|^2={w\,\overline{w}}=u(x,y)^2+v(x,y)^2\tag{4}\]
\(w\) は正則関数であるから、その実部 \(u\)・虚部 \(v\) は \(\Omega_{\mathbb{R}}\) 上で \(C^{\infty}\) 級であり、\(f=u^2+v^2\) も \(\Omega_{\mathbb R}\) 上で\(C^{\infty}\) 級の実二変数実数値関数である
1.2 等位線
まず、複素関数の絶対値関数に限らず、開集合 \(U\subset\mathbb{R}^2\) 上の連続一階微分可能な実2変数実数値関数 \( g\in C^1(U;\mathbb{R}) \) を考える。\(\mathbb{C}\) と \(\mathbb{R}^2\) を \( z=x+iy \,\longleftrightarrow\, (x,y) \) によって同一視し、必要に応じて \(g(x,y)\) を \(g(z)\) と表記する。 ただし、これは \(g\) が複素変数について正則であることを意味するものではなく、 実二変数関数を複素数によって表記しているにすぎないことに注意。
定数 \(C\in\mathbb{R}\) に対し、\(g\) の等位集合を
\( L_C \equiv \left\{ (x,y)\in U \mid g(x,y)=C \right\} \tag{5} \)
と定義する。
なお、一般の \(g\) については \(C\) は任意の実数でよいが、\(g\) として \(f=|w|^2\) を選ぶ場合には \(g\geq0\) となるので、 非空となりうる等位集合を考えるには \(C\geq0\) と定める。
複素数 \(z=x+iy\) と実平面上の点 \((x,y)\) を同一視すると、この等位集合は複素 \(z\) 平面上の点の集合として見ることができる。そのうち、局所的に連続かつ滑らかな曲線として表される部分を、\(g\) の等位線と呼ぶ。すなわち等位線とは、\(z\) 平面上を移動しても \(g(z)\) の値が一定に保たれる曲線である。
ただし、等位集合全体が常に一本の等位線になるとは限らない。等位集合は、互いに離れた複数の曲線、閉曲線、無限に延びる曲線、孤立した点などから構成される場合があり、複数の曲線が交差または接する場合もある。したがって本稿では、等位集合のうち、勾配が零でない点を通り、局所的に滑らかな曲線となる各部分を等位線として扱う。
1.3 勾配
実二変数実数値関数 \(g\in C^1(U;\mathbb{R})\) の勾配を
\[ \nabla g(x,y) \equiv \left( \frac{\partial g}{\partial x}, \frac{\partial g}{\partial y} \right) \in\mathbb{R}^2 \tag{6} \]
と定義する。勾配は \(g(x,y)=0\) であるか否かにかかわらず、 \(g\) が微分可能な点で定義される。 また、\(\nabla g\neq0\) となる点では、勾配ベクトルは その点を通る等位線の法線方向を向く。
ここで、実二次元ベクトルを複素数で表現するため、複素表示された勾配(以後は複素勾配と簡記)
\[ \nabla_{\mathbb{C}}g \equiv \frac{\partial g}{\partial x} +i\frac{\partial g}{\partial y} \in\mathbb{C} \tag{7} \]
を形式的に導入する。 これは実二次元勾配 \(\nabla g\) を複素数として表式化したものであり、 通常の意味での複素微分ではない。
さらに、
\[ \frac{\partial}{\partial z} = \frac{1}{2} \left( \frac{\partial}{\partial x} -i\frac{\partial}{\partial y} \right), \qquad \frac{\partial}{\partial\overline z} = \frac{1}{2} \left( \frac{\partial}{\partial x} +i\frac{\partial}{\partial y} \right) \tag{8} \]
で定義されるウィルティンガー微分を \(g\) に作用させると、
\[ \frac{\partial g}{\partial\overline z} = \frac{1}{2} \left( \frac{\partial g}{\partial x} +i\frac{\partial g}{\partial y} \right) \tag{9}\]
であるから、\(g\) の複素勾配は
\[ \nabla_{\mathbb{C}}g = 2\frac{\partial g}{\partial\overline z} \tag{10} \]
となる。 ここで、\(w:\Omega\to\mathbb{C}\) は開集合 \(\Omega\subset\mathbb{C}\) 上の正則関数であるから \(w(z)=u(x,y)+iv(x,y)\) と書くと、正則性より実部 \(u\) と虚部 \(v\) は コーシー・リーマンの関係
\[ \frac{\partial u}{\partial x} = \frac{\partial v}{\partial y}, \qquad \frac{\partial u}{\partial y} = -\frac{\partial v}{\partial x} \tag{11}\]
を満たす。ウィルティンガー微分の定義を \(w=u+iv\) に適用すると、
\begin{eqnarray} \frac{\partial w}{\partial\overline z} &=& \frac12 \left( \frac{\partial w}{\partial x} +i\frac{\partial w}{\partial y} \right)\\\\ &=& \frac12 \left\{ \left( \frac{\partial u}{\partial x} - \frac{\partial v}{\partial y} \right) +i \left( \frac{\partial v}{\partial x} + \frac{\partial u}{\partial y} \right) \right\} \tag{12}\end{eqnarray}
右辺の実部と虚部はいずれもコーシー・リーマンの関係によって零となるため、
\[ \frac{\partial w}{\partial\overline z}=0 \tag{13}\]
を得る。同様に、
\begin{eqnarray} \frac{\partial w}{\partial z} &=& \frac12 \left( \frac{\partial w}{\partial x} -i\frac{\partial w}{\partial y} \right)\\\\&=& \frac12 \left\{ \left(\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y}\right) +i\,\left(\frac{\partial v}{\partial x}-\frac{\partial u}{\partial y}\right) \right\} \tag{14}\end{eqnarray}
についても、コーシー・リーマンの関係式を用いると
\[\frac{\partial w}{\partial z}= \frac{\partial u}{\partial x}+i\,\frac{\partial v}{\partial x}=\frac{\mathrm{d}w}{\mathrm{d}z}\tag{15}\]
が成り立つことがわかる。複素共役を取った関数についても、
\begin{eqnarray} \frac{\partial\overline{w(z)}}{\partial z}&=&\frac12 \left\{ \frac{\partial }{\partial x}\left(u-i\,v\right) -i\frac{\partial }{\partial y}\left(u-i\,v\right) \right\}\\\\&=&\frac12 \left\{ \left( \frac{\partial u}{\partial x} - \frac{\partial v}{\partial y} \right) -i \left( \frac{\partial v}{\partial x} + \frac{\partial u}{\partial y} \right) \right\}\\\\&=&0\tag{16} \\\\\frac{\partial\overline{w(z)}}{\partial \overline{z}}&=&\frac12 \left\{ \frac{\partial }{\partial x}\left(u-i\,v\right) +i\frac{\partial }{\partial y}\left(u-i\,v\right) \right\}\\\\&=&\frac12 \left\{ \left( \frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} \right) -i \left( \frac{\partial v}{\partial x} - \frac{\partial u}{\partial y} \right) \right\}\\\\ &=& \frac{\partial u}{\partial x}-i\,\frac{\partial v}{\partial x}\\\\&=& \overline{\frac{\mathrm{d}w}{\mathrm{d}z}}\tag{17} \end{eqnarray}
が成り立つ。したがって、\(f(z)=|w(z)|^2=w(z)\overline{w(z)}\) の 複素共役変数 \(\overline{z}\) に関するウィルティンガー微分は、積の微分則および(13)~(17)式を用いると
\begin{eqnarray} \frac{\partial f}{\partial\overline z} &=&\frac{\partial w}{\partial\overline z}\, \overline{w(z)} + w(z) \frac{\partial\overline{w(z)}}{\partial\overline z}\\\\ &=& w(z)\overline{\frac{\mathrm{d}w(z)}{\mathrm{d}z}} \tag{18} \end{eqnarray}
となる。\(f\) は \(\Omega_{\mathbb{R}}\) 上の連続1階微分可能な実二変数実数値関数であるから、その複素勾配は(10)および(18)式から以下のように表せる。
\[ \nabla_{\mathbb C}f = 2\frac{\partial f}{\partial\overline z} = 2\,w(z)\overline{\frac{\mathrm{d}w(z)}{\mathrm{d}z}}\tag{19} \]
1.4 最急降下曲線
実二変数実数値関数 \(g\in C^1(U;\mathbb{R})\) に対し、 区間 \(I\subset\mathbb{R}\) 上の連続一階微分可能な曲線 \( \gamma:I\longrightarrow U \) が
\[ \frac{\mathrm d\gamma}{\mathrm dt} = -\nabla\,g\bigl(\gamma(t)\bigr), \qquad t\in I \tag{20} \]
を満たすとき、\(\gamma\) を \(g\) の
実際、曲線に沿った \(g\) の変化率は
\[ \begin{aligned} \frac{\mathrm d}{\mathrm dt}g\bigl(\gamma(t)\bigr) &= \nabla g\cdot\frac{\mathrm d\gamma}{\mathrm dt} \\ &= -\|\nabla g\|^2 \leq0 \end{aligned}\tag{21} \]
となるため、\(g\) の値は曲線に沿って単調非増加となる。
また、等位線を \( \boldsymbol r(s) = \bigl(x(s),y(s)\bigr) \) と媒介変数表示すると、等位線上では \( g\bigl(\boldsymbol r(s)\bigr)=C \) が成り立つ。 これを \(s\) で微分すると、
\[ \nabla g\cdot \frac{\mathrm d\boldsymbol r}{\mathrm ds} = 0 \tag{22}\]
を得る。したがって、\(\nabla g\neq0\) となる点では、 勾配ベクトルは等位線の接ベクトルと直交する。 最急降下曲線の接ベクトルは \(-\nabla g\) であるから、 最急降下曲線と等位線も互いに直交する。
一方、\(\nabla g=0\) となる臨界点では、勾配方向も等位線の接線方向も一意に定まるとは限らないが、\(w(z)\) として多項式のような性質の良い関数を選んで電子式アナログ計算機により等位線や最急降下曲線を描出する際には一般に気にする必要がない。
1.5 最急降下曲線及び等位線が満たす微分方程式
前節までの一般論において、\( U=\Omega_{\mathbb R},\, g=f \) と置くことができる。 したがって、(20)式から、\(f(z)=|w(z)|^2\) の最急降下曲線が満たす微分方程式は、
\begin{eqnarray}\frac{\mathrm{d}z}{\mathrm{d}t}&=&-\nabla_{\mathbb{C}}f\tag{23}\end{eqnarray}
であり、\(f\) の複素勾配 (19)式を用いると、
\[\frac{\mathrm{d}z}{\mathrm{d}t}=-2\,w(z)\,\overline{\frac{\mathrm{d}{w(z)}}{\mathrm{d}{z}}}\tag{24}\]
と表現される。等位線の接線方向は最急降下曲線と直交するということなので、式(25)の右辺に \(i\) もしくは \(-i\) を掛けると、等位線上の軌道が満たす微分方程式が以下のように求まる。
\[\frac{\mathrm{d}z}{\mathrm{d}t}=\pm\,2\,{i}\,w(z)\,\overline{\frac{\mathrm{d}{w(z)}}{\mathrm{d}{z}}}\tag{25}\]
実際、式(25)に沿った \(f\) の変化率は
\begin{eqnarray} \frac{\mathrm df}{\mathrm dt} &=& \operatorname{Re} \left\{ \overline{\nabla_{\mathbb{C}}f} \frac{\mathrm dz}{\mathrm dt} \right\} \\\\ &=& \operatorname{Re} \left\{ \pm i \left| \nabla_{\mathbb{C}}f \right|^2 \right\} \\\\ &=&0 \tag{26}\end{eqnarray}
となるため、軌道上で \(f\) の値は一定に保たれる。 したがって、\(\nabla f\neq0\) となる領域では、式(25)の積分曲線は初期値 \(z_0(t=0)\) によって定まる \(f\) の等位線上をたどる。
1.6 等位線の演算方程式
等位線上の点が満たす式(25)について、\(w(z)\) や \(\frac{\mathrm{d}w}{\mathrm{d}z}\) を実部と虚部に分離すると、
\begin{eqnarray}\frac{\mathrm{d}z}{\mathrm{d}t}&=&\pm\,{i}\,\biggl\{\operatorname{Re}\bigl(w\bigr)+i\,\operatorname{Im}\bigl(w\bigr)\biggr\}\,\biggl\{\operatorname{Re}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)- i\,\operatorname{Im}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)\biggr\}\\\\ &=&\pm\,{i}\,\Biggl[\operatorname{Re}\bigl(w\bigr)\operatorname{Re}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)+ \operatorname{Im}\bigl(w\bigr)\operatorname{Im}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)+ i\,\biggl\{-\operatorname{Re}\bigl(w\bigr)\operatorname{Im}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr) +\operatorname{Im}\bigl(w\bigr)\operatorname{Re}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)\biggl\}\Biggr]\\\\ &=&\pm\Biggl\{\operatorname{Re}\bigl(w\bigr)\operatorname{Im}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)- \operatorname{Im}\bigl(w\bigr)\operatorname{Re}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)\Biggr\}\pm\, i\,\biggl\{\operatorname{Re}\bigl(w\bigr)\operatorname{Re}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)+ \operatorname{Im}\bigl(w\bigr)\operatorname{Im}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)\biggl\}\tag{27}\end{eqnarray}
以上のことから、\(\operatorname{Re}\Bigl(\frac{\mathrm{d}z}{\mathrm{d}t}\Bigr)\) を入力とし、\(\operatorname{Re}\bigl(z\bigr)\) を出力とする積分器と、\(\operatorname{Im}\Bigl(\frac{\mathrm{d}z}{\mathrm{d}t}\Bigr)\) を入力とし、\(\operatorname{Im}\bigl(z\bigr)\)を出力とする積分器の2つを用意し、(15)式を用いて帰還ループを閉じてあげれば、演算回路が完成する。つまり、等位線の軌道を生成するアナログ計算機上での方程式は、以下の2元連立1階微分方程式に定式化できる。
\begin{cases}\displaystyle\operatorname{Re}\biggl(\frac{\mathrm{d}z}{\mathrm{d}t}\biggr)=\pm\,\Biggl\{\operatorname{Re}\bigl(w\bigr)\operatorname{Im}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)- \operatorname{Im}\bigl(w\bigr)\operatorname{Re}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)\Biggr\}\\\\ \displaystyle\operatorname{Im}\biggl(\frac{\mathrm{d}z}{\mathrm{d}t}\biggr)=\pm\,\Biggl\{\operatorname{Re}\bigl(w\bigr)\operatorname{Re}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)+ \operatorname{Im}\bigl(w\bigr)\operatorname{Im}\Bigl(\frac{\mathrm{d}w}{\mathrm{d}z}\Bigr)\Biggr\}\tag{28}\end{cases}
最急降下曲線のほうも同様の計算で導くことができるが、ここでは省略する。
ここにおいて当初の目的通り、\(w(z)\) として実係数の高次多項式を選ぶ場合を考える
\[ w(z) = \sum_{k=0}^{n}a_kz^k, \quad n\in\mathbb{N},\;a_k\in\mathbb{R}, \; a_n\neq0 \tag{29} \]
\(f(z)=|w(z)|^2\) も \(\frac{\mathrm{d}z}{\mathrm{d}t}\) も同じく実係数の多項式になる。 等位線と最急降下曲線、いずれを描くにしても、\(\operatorname{Re}\bigl(w\bigr)\)、\(\operatorname{Im}\bigl(w\bigr)\) などの演算信号は \(z\in\mathbb{C}^{1}\) についての多項式であるわけだから、\(z\) のべき乗 \(z,\,z^2,\,z^3\,...\) を実部と虚部のペアで生成する必要がある。 たとえば複素数 \(z\) を2乗する際、乗算器が加算器に比べ豊富にある場合は
\begin{cases}\operatorname{Re}\bigl(z^2\bigr)=\operatorname{Re}\bigl(z\bigr)^2-\operatorname{Im}\bigl(z\bigr)^2\\\\\operatorname{Im}\bigl(z^2\bigr)=2\operatorname{Re}\bigl(z\bigr)\,\operatorname{Im}\bigl(z\bigr)\tag{30}\end{cases}
の関係を直接実装すればいいが、乗算器より加算器が多い場合は、実部の方を因数分解して乗算器を1つ減らすほうがよいだろう。(そのかわり加算器の数は増える。)
当然ながら、式の形によってはスケーリングを施す必要が出てくる。特に加算器の出力には注意すべきである。飽和しやすい信号は、微分値 \({\mathrm{d}w}/{\mathrm{d}z}\) の実部・虚部であり、優先的にスケールダウンすること。その後段にある乗算器や加算器もそれに伴いスケーリング係数が掛けられることになるが、最後に積分器 \(\mathrm{d}z/\mathrm{d}t\) に入力する際に辻褄を併せればよい。(その積分器入力ゲインが等高線描画の速度を決定する。)
また、等高線を描画する範囲が\(z\)のマシンユニット範囲ギリギリにまで及ぶ場合、\(z^2\), \(z^3\)も飽和する恐れがある。その際も同様にスケールダウンし、後段で辻褄合わせをおこなうこと。
2.7 等位線の値を陽に定めるとき
(29)の式をスケーリングして演算回路に直せば等位線は描かれるが、描きたい等位線の値 \(w(z)\overline{w(z)}=C\) を直接指定することはできない(定数Cの値を直接与えるのではなく、絶対値の2乗がCとなるz平面上の座標点を積分器の初期条件として与える必要がある)ので、与える初期条件が少しでもずれると描かれた等位線も真の軌道からずれ得る。 さらに、何らかの理由で積分器の誤差が大きくなると、等位線の描くループが複素平面上で1周しても閉じないこともありえる。 それらを解決するために、常に\(G(z)=w(z)\overline{w(z)}-C\) の値が0に等しくなるよう演算回路全体のゲインを補正する項を導入する方法が考案されている[1]。 \(K\) を正のゲインとして、等位線を描画する微分方程式は以下のようになる。
\[\frac{\mathrm{d}z}{\mathrm{d}t}=\bigl\{\pm\,{i}-2KG(z)\bigr\}\,w(z)\,\overline{\frac{\partial{w(z)}}{\partial{z}}}\tag{31}\]
(29)式のかわりにこの式を演算方程式とすれば、多少初期位置がずれたとしても、軌道はゲイン \(K\) が大きいほど素早く\(C\)の等位線に「吸着」し、定常誤差も小さくできる。 ただし、必要となる演算器の数が多くなることが難点である。また、ゲイン\(K\)があまりにも大きすぎると回路が不安定になるので、値の選択には注意が必要である。
2.8 演算結果
以下の4次関数
\[w(z)=0.25z^4-0.06z^3+0.05z^2+0.1z-0.1\tag{32}\]
\[\frac{\mathrm{d}w(z)}{\mathrm{d}z}=z^3-0.18z^2+0.1z+0.1\tag{33}\]
を、補正項なしの(28)式に則って演算し、等位線を描いた結果は以下のようになった。
図1 (19)式の \(w(z)\overline{w(z)}\) の等位線(左:厳密解 右:アナログ計算機解)
\(C\) の値を直接定めることができないため初期位置を精度よく与えることに労力を注ぐ必要がなり、誤差も生じやすいが、それでも厳密解によく一致している。 精度を上げるテクニックとして、等位線が半周したのち積分器に入力する信号の符号を変えてもう半周を描画する方法を採ることで、累積誤差を小さく抑えることができる。
同様の方法で最急降下曲線を演算した結果を図2に示す。
図2 (32)式の等位線と最急降下曲線
つぎに、\(C\) の値を陽に与え、誤差を補正する方法(式(31))を用いて次の3次関数
\[w(z)=z^3+0.5z^2+0.5z-0.5\tag{34}\]
\[\frac{\mathrm{d}w(z)}{\mathrm{d}z}=3z^2+z+0.5\tag{35}\]
の等位線を描いた結果と、その演算回路を示す。
図3 (34)式の \(w(z)\overline{w(z)}\) の等位線(左:厳密解 右:アナログ計算機解)
図4 図3の演算回路
図6から、後者の手法の方が精度が極めて良いことがわかる。なにより、初期値とその点の絶対値をいちいち計算しなくて良いことがありがたい。
参考までに、文献[1] (1965年) に掲載されている、当時の低速型アナログ計算機(乗算器はサーボ式乗算器である)を用いた6次関数のプロットを引用しておく。
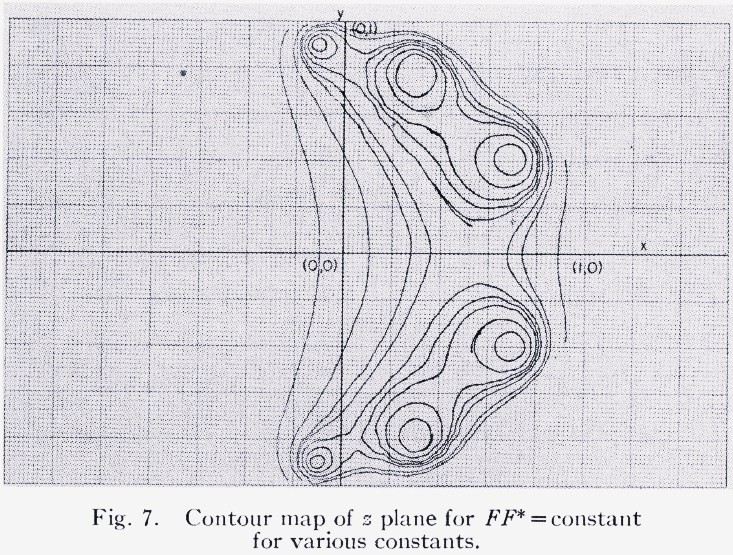
図5 文献[1] Fig.7より 6次関数の等高線の演算結果
軌道が歪んでいるのは、当時の演算増幅器のゲイン不足・オフセット誤差が効いていることが原因と思われる。
※注意事項※
(1)上記のように等位線描画回路は複雑であるから、結線間違いを犯しやすいので十分注意する。正しい演算を行うと、根付近の軌道は実関数系で考えた時の中心点(渦点)になるはずであるが、根に湧き出しや吸い込みが発生したならば、十中八九、回路中で実部と虚部のゲイン差が生じて減衰・発散項が現れていると考えてよい。その場合、丁寧に各演算器の入力ゲインを見直すと間違いが見つかるだろう。 軌道上で明らかに不自然な不連続点が生じた場合、演算回路のどこかで飽和が発生している可能性が高い。また、根に近い部分では絶対値が極めて小さく(SN比が悪く)なり、軌道に歪が生じることもある。スケーリング係数は臨機応変に変更することが賢明であろう。
(2) 今回のように最急降下曲線や等位線を描画するほかに、等位線描画回路に減衰項をあえて付与し、初期点から等位面に沿って根へ落ちていく軌道を描画する求根手法も存在する。
(3) 最急降下曲線の演算回路として、通常のデカルト座標系(Cartesian coordinate system)を用いた手法を説明したが、極座標系(polar coordinate system)を採用したものも考案されている。後者については文献[5]のp276~p277などに詳しい。
2.アイソグラフ
高次多項式の複素根を求める方法として、アイソグラフと呼ばれる手法もある。
関数\(w(z)\,(z\in{\mathbb{C}})\) が実数係数の多項式関数であるとする。
\[w(z)=\sum_{k=0}^{n}{a_{k}z^{k}}\qquad(\,n\in{\mathbb{N},\,a_{k}\in{\mathbb{R},\,a_n\neq{0}}}\,)\tag{36}\]
変数 \(z\) を
\[z=r\,e^{i\theta}\quad{(\,r\gt{0}\,)}\tag{37}\]
と極座標表示すると、
\begin{eqnarray}w(z)&=&\sum_{k=0}^{n}{a_{k}\,r^{k}e^{i\,k\theta}}\\\\&=&\sum_{k=0}^{n}{a_{k}\,r^{k}\left\{\cos{(k\theta)}+i\,\sin{(k\theta)}\right\}}\\\\&=&\sum_{k=0}^{n}{a_{k}\,r^{k}\cos{(k\theta)}}+i\sum_{k=0}^{n}{a_{k}\,r^{k}\sin{(k\theta)}}\tag{38}\end{eqnarray}
ここで、絶対値\(r\) を係数器で設定する定数とし、偏角 \(\theta\) を演算独立変数とみなせば、関数 \(w\) の実部と虚部
\[\operatorname{Re}(w)=\sum_{k=0}^{n}{a_{k}\,r^{k}\cos{(k\theta)}}\,,\quad\operatorname{Im}(w){\sum_{k=0}^{n}{a_{k}\,r^{k}\cos{(k\theta)}}}\tag{39}\]
を演算することは容易である。(sinやcosは2階微分方程式を解くサークルテスト回路で生成できる。)
上記2信号をXYモードのオシロスコープやXYレコーダに入力して描く軌跡を観察し、 \(0\lt\theta\lt2\pi\) の範囲で原点を通過するのなら、その点の写像元の \(z\) が多項式関数 \(w\) の根であることが分かる。よって、その点の偏角 \(\theta\) を、計時もしくは別個で \(\operatorname{Re}(w)-t\) グラフ、\(\operatorname{Im}(w)-t\)グラフを得ることで調べ、既知の \(r\) とあわせて複素根を求めることができるというものである。
1節と同じ4次方程式について、写像先の軌跡と時系列グラフを求めた結果を次に示す。
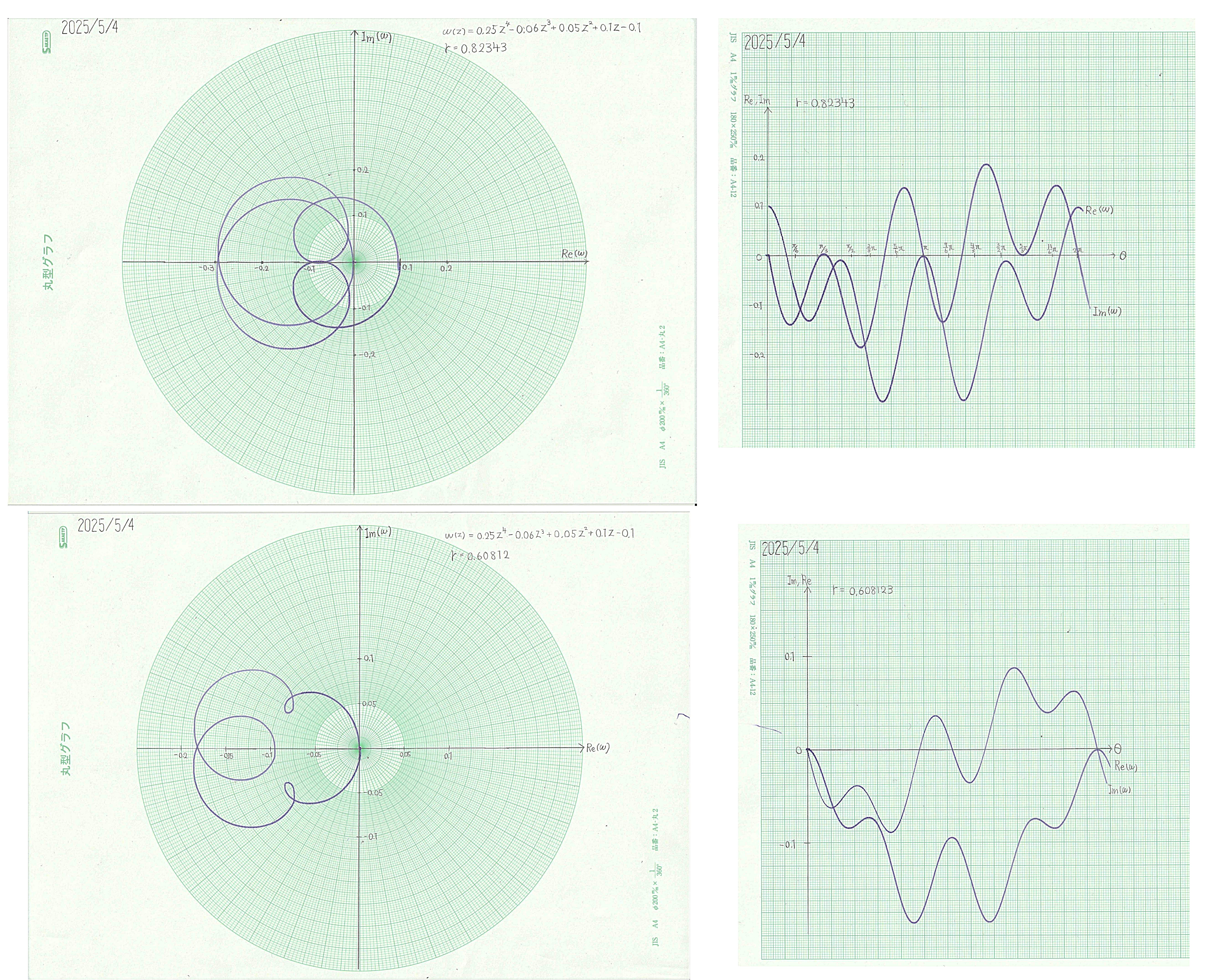
図6 アイソグラフ
3.参考文献
[1] A. Hausner. "Analog Computer Techniques for Problems in Complex Variables," in IEEE Transactions on Electronic Computers, vol. EC-14, no. 6, pp. 898-908, 1965.
[2] Byron O. Marshall, "The Electronic Isograph for Roots of Polynomials," J. Appl. Phys. 1 April 1950; 21 (4): 307–312. https://doi.org/10.1063/1.1699660
[3] A. Hausner. “Machines for Solving Algebraic Equations.” Mathematical Tables and Other Aids to Computation, vol. 1, no. 9, 1945, pp. 337–53. https://www.jstor.org/stable/2002339
[4] 佐々木 彬夫, 小沢 保知.「ハイブリッド・アイソグラフ」情報処理学会 ,13巻, 2号 ,1972. https://ipsj.ixsq.nii.ac.jp/records/8249
[5] 山下 英夫. 「電子計算機 アナログ計算機編」第2版, オーム社, 1959.